 |

【官方微信小程序】

企业资料
北京安培通科技有限公司
联系人:李晴(销售经理)
固 话:010-56155246
手 机:18001359049
产品搜索
| 型号 | APT-QGJ02 | 用途 | 切割 |
|---|---|---|---|
| 工作形式 | 点焊 | 驱动形式 | 自动 |
| 电流 | 直流A | 作用对象 | 金属 |
| 焊接原理 | 冷焊 | 动力形式 | 等离子 |
| 作用原理 | 脉冲 | 样式 | 悬挂式 |
| 加工精度 | 大功率 | 保护气体类型 | 其他 |
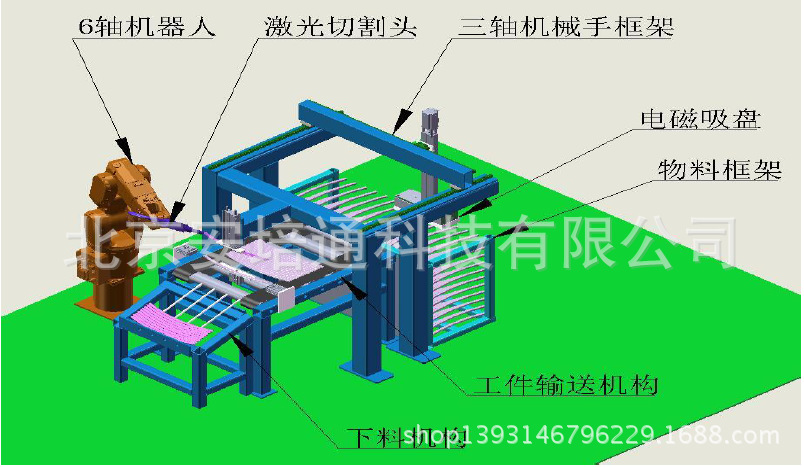
一、 设备布局示意图
1、整体结构(图为示意图)

二、设备动作分解示意
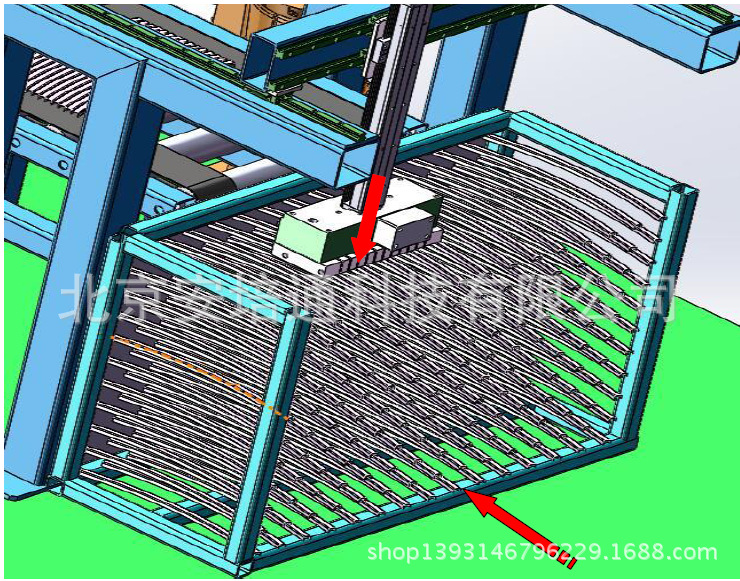
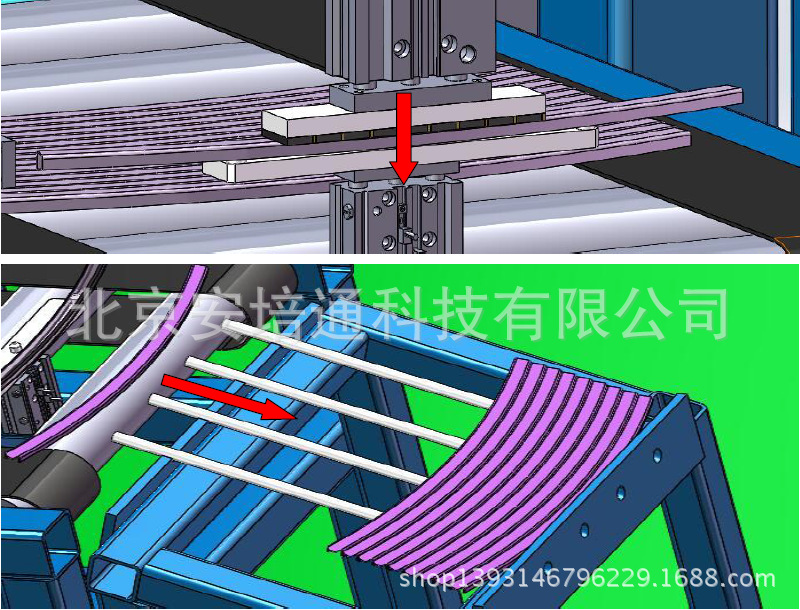
1,人工将料框推到位,电磁吸盘下降将工件一排吸起
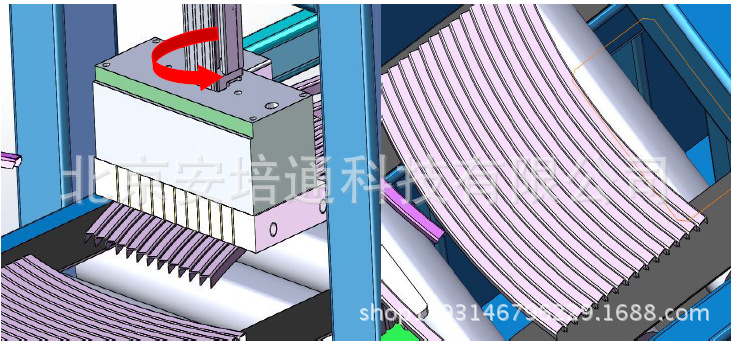
2,吸盘将工件吸起旋转后放置于输送机构上
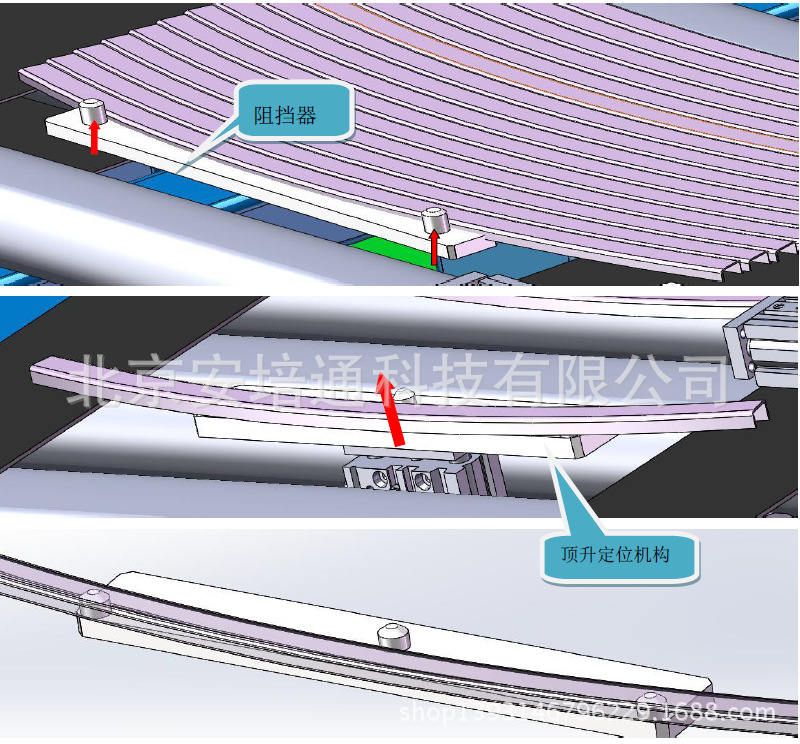
3,阻挡器挡住工件,下面定位机构将工件卡入定位销并顶起

4,工件顶起后,两侧的定位对中机构对顶起的工件进行对中定位。

5,对中机构退出,上部吸盘下降将工件吸附上升,顶升机构下降。
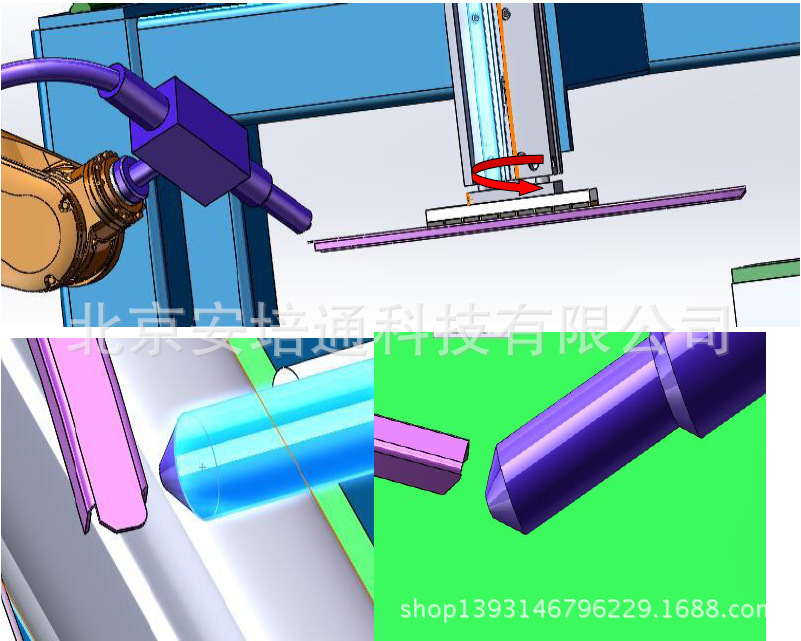
6,机器人带激光头按照路径进行切割,完成后吸盘旋转再切割另一端。
7,切割完成后吸盘下降将完成工件放置于输送带上,并输送到下料机构。
三,设备整体配置清单
1,3轴机械手(含电磁吸盘),非标定制
2,工件输送机构,非标定制
3,下料机构,非标定制
4,自动定位对中机构,非标定制
5,6轴工业机器人,ABB
6,光纤激光器


